The Further Multitonic Change Probe
John Coltrane’s “Giant Steps” is a notable example for the use of multitonic changes based on the notes of descending B (B-G-E♭/G-E♭-B) and ascending E♭ (E♭-G-B-E♭) augmented triads. One may notice that all the permutations of an augmented triad can be basically divided into ascending (1-3-♯5, 3-♯5-1 and ♯5-1-3) or descending (♯5-3-1, 3-1-♯5 and 1-♯5-3).
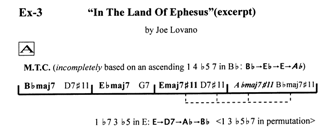
Taking this one step further, consider the other “four-note” symmetrical groups of limited transposition. There are only three types of four-note groupings that are symmetrical groups of limited transposition: (1) 1-♭3-♭5-6 <diminished>, (2) 1-4-♭5-7 <1-♭2-♭5-5 in inversion>, (3) 1-3-♭5-♭7 <1-2-♭5-♭6 in inversion>. The permutations of 1-4-♭5-7 and 1-3-♭5-♭7 can be schematized in Ex-1 and 2: (NOTE: 1-♭3-♭5-6 is omitted for lack of space)
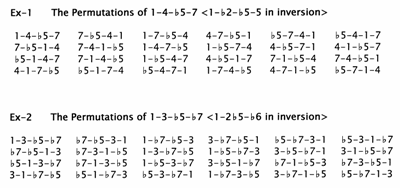
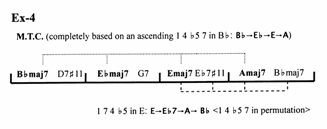
In fact, the tabulated permutations of Ex-1 and 2 provide soloists and writers with a feast of ideas to probe into the possibilities of multitonic changes. Consider Joe Lovano’s “In The Land Of Ephesus” from his CD “Tenor Legacy” (Blue Note 27014). It seems probable that he subconsciously uses a combination of 1-4-♭5-7 and 1-3-♭5-♭7 to form the progression of the song (Ex-3):
The key structure of B♭-E♭-E-A♭ is incomplete to form an ascending 1-4-♭5-7 (because “A♭” is ♭VII of B♭). In exchange, Lovano adds a new twist to the tail of four-bars: E-D7-A♭-B♭ (completely based on a permuted 1-3-♭5-♭7 in E: 1-♭7-3-♭5).
Using the variations of permuted patterns, the harmonic idea of “In The Land Of Ephesus” can be ambitiously reorganized (EX-4):
The four bars of Ex-4 are based on an ascending 1-4-♭5-7 note group in B♭, yielding the key structure that moves from B♭-E♭-E-A. The last two bars (within the four bars) are composed of a permuted 1-4-♭5-7 (i.e., 1-7-4-♭5) in E, yielding a chord progression that moves from E-E♭7-A-B♭. Use Ex-4 for reharmonizing (or superimposing) jazz standards (ex. “Tune Up,” “What Is This Thing Called Love?” etc.) where the key of B♭ <II-V-I> occurs.
2003©masayayamaguchi